The future of mobility
Our mobility environment is changing rapidly. The Corona crisis has increased people's desire for hygiene and private spaces. This is the main reason why the trend is moving away from holistic solutions and towards individual transport. Alongside this, technologies such as autonomous driving are constantly evolving and the social issue of the climate crisis is triggering discussions about sustainability and environmental protection. These trends are leading to a future of mobility in which all vehicles are connected and communicate with each other. Sustainable transportation options are strongly established in society and people mainly seek individual mobility solutions for their journeys.
Although trends are strongly towards individual and sustainable means of transportation, the most sustainable and healthy option is not included in the development: Walking. It is considered in transportation systems, but not properly integrated.
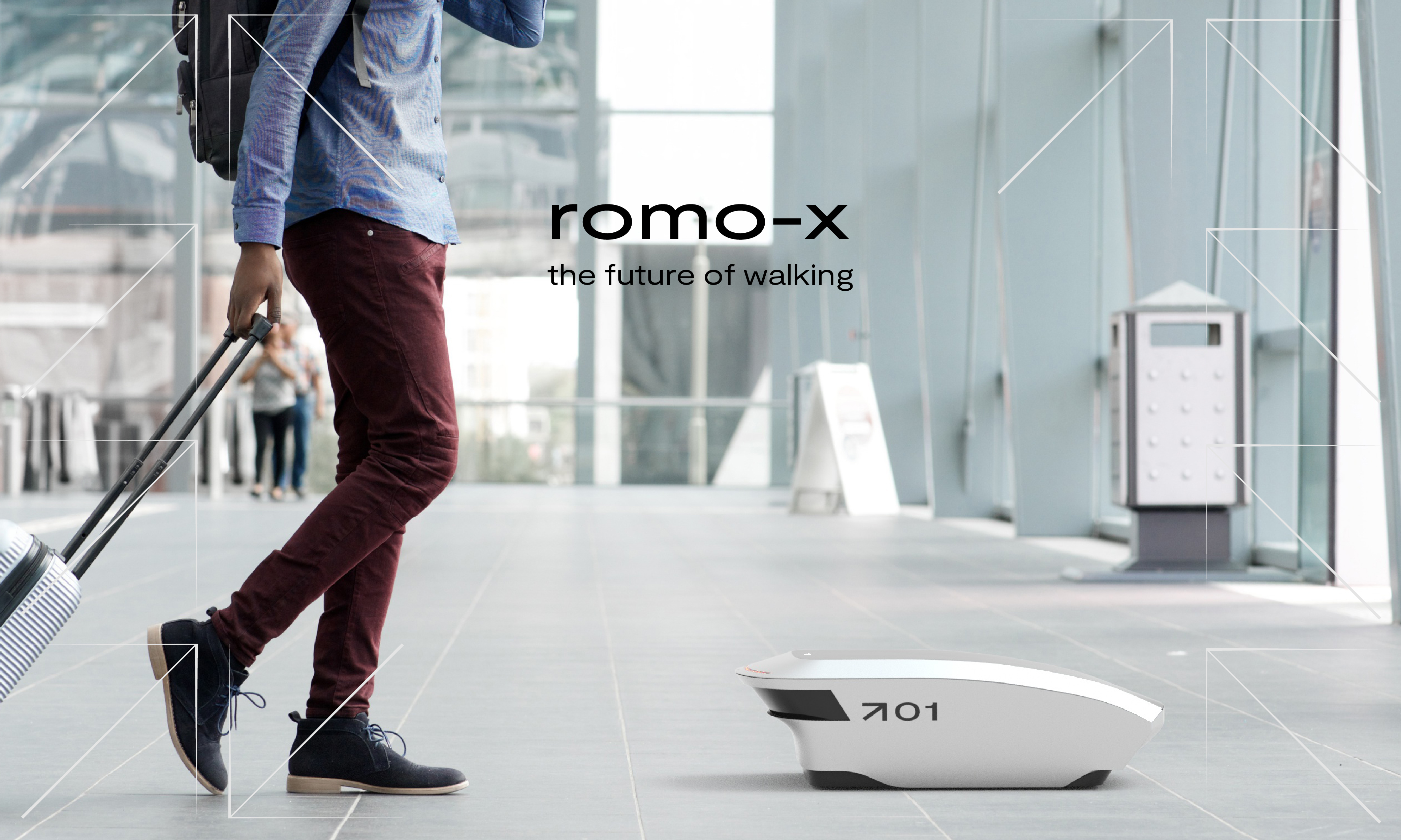
romo–x | the future of walking
Romo–x is a fictional innovation lab that has set itself the task to research in the field of future mobility and how the role of pedestrians in autonomous road traffic will develop in the future. Romo–x stands for robotic-supported movement experience. The institution focuses their research work on experimentally approaches in the field of walking, in order to make walking attractive again and to integrate it into existing mobility systems by means of technical aids.
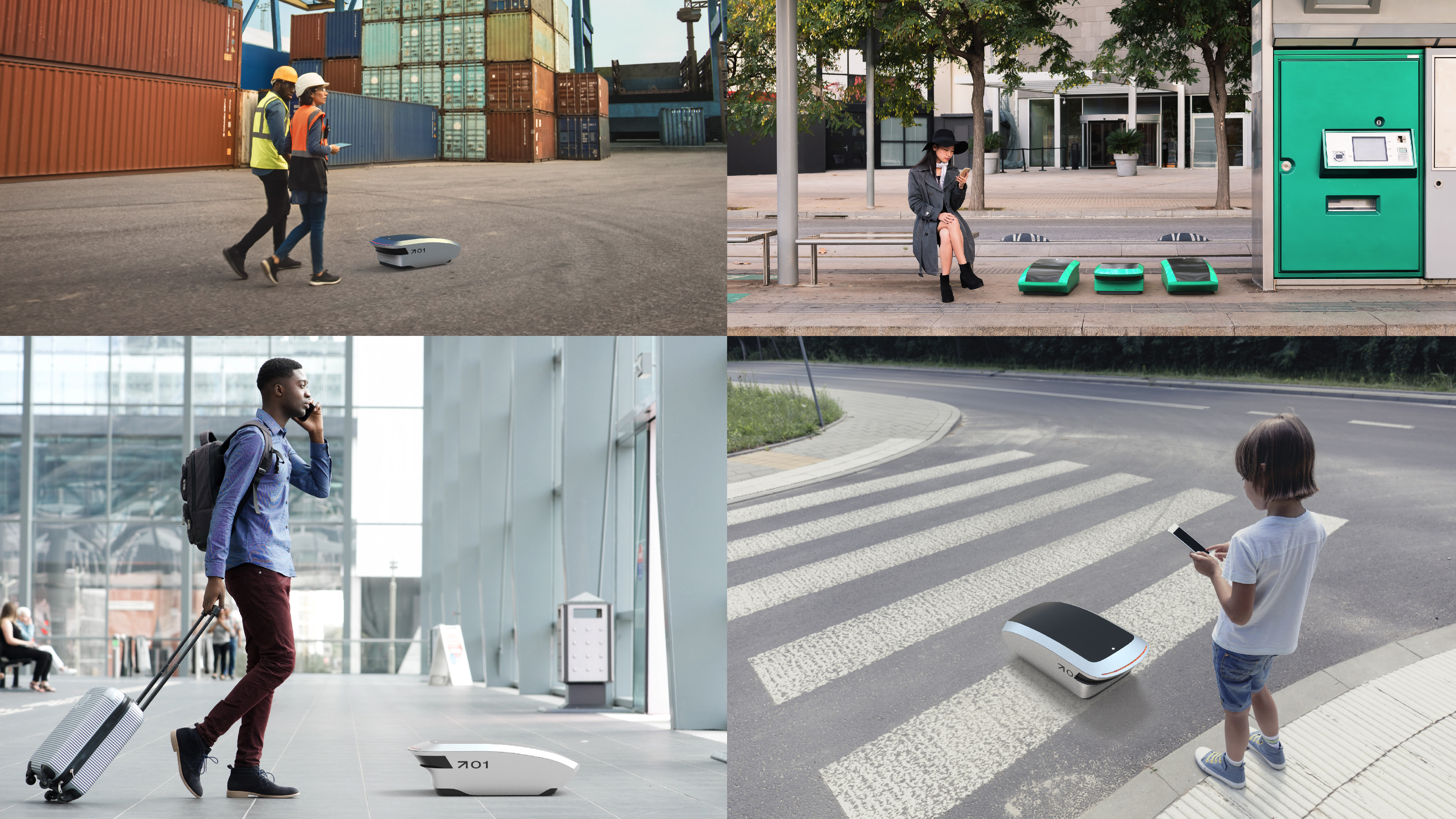
romo–01 | security - efficiency - comfort
In order to increase the security of pedestrians, to make walking more efficient and to provide comfort to motivate people to walk, the prototype romo–01 was developed. Its function is to integrate humans into autonomous traffic. In this manner it closes the safety gap between autonomous vehicles and pedestrians. As a physical product romo–01 takes over the communication with other autonomous vehicles, minimizes the safety risk of the user and thereby prevents accidents. At the same time, in addition to communication, it also handles navigation through road traffic. This increases the efficiency of the entire system. For humans, this means that time spent walking can be used wisely for other things. The simple coordination provided by the application that comes with romo–01 also brings the necessary convenience.
Speculative Design approach
To address future challenges and circumstances, the Speculative Design approach was followed in this project and various Design Futuring methods were applied. These methods served us through the development to break up existing systems, to generate new approaches and to broaden or focus the view at the right places.